Когда имеется лишь один ориентир, но расстояние до него определено быть не может, то прибегают к методу крюйс-пеленга. Этот метод
сочетает получение линий положения судна с учетом элементов счисления — курса судна и пройденного судном расстояния, измеренного
по лагу, за время между пеленгованиями ориентира. Поэтому полученное место судна называется счислимо-обсервованным.
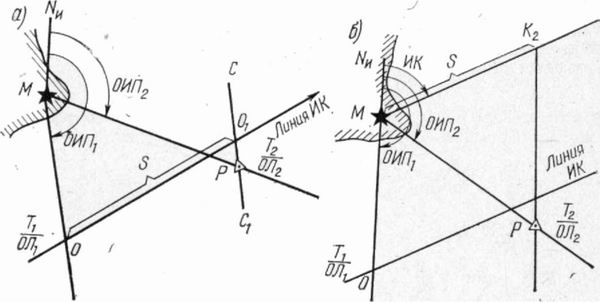
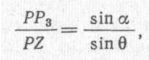
Способ определения места судна по крюйс-пеленгу состоит в следующем. В какой-то момент Т1 из точки О с судна берут OКП1 ориентира М (рис. 81, а) и замечают отсчет лага олг. Когда пеленг изменится не менее чем на 30° (что зависит от расстояния до ориентира, от
скорости и курса судна), берут ОКП2 того же ориентира и замечают
при этом момент времени Т2 и ол2. Полученные компасные пеленги
исправляют в истинные и определяют пройденное расстояние 5, как
разницу между отсчетами лага (ол2 — ол1), исправив его поправкой
лага. Произведя прокладку ОИП, из точки О пересечения линии ОИП1
с линией ИК откладывают в направлении движения судна пройденное расстояние S по линии ИК. Через полученную точку О1 проводят
линию СС1 параллельную линии ОИП1 до пересечения с линией
ОИП2. Точка Р их пересечения будет счислимо-обсервованным местом
судна в момент времени Т2.
Получение места судна на карте, определяемого по крюйс-пелен»
гу, можно выполнять и другими графическими приемами, как, напри-
мер, от ориентира М (рис. 81, б) по направлению движения судна проводят линию МК2, параллельную линии ИК, и откладывают на ней
величину S. Из точки К2 проводят линию, параллельную линии ОИП1
которая в пересечении с линией ОИП2 даст точку, соответствующую
месту судна в момент взятия ОКП2.
Рис. 81
Однако этот прием требует лишних построений, поэтому предпочтение отдается первому.
Определение места судна при дрейфе и на течении
Если определение места судна по крюйс-пеленгу ведут при дрейфе
или на течении, расчеты и построения производят в той же последовательности, что и при определении места по крюйс-пеленгу (общий случай), но при дрейфе пройденное судном расстояние за время между
взятием ОКП откладывают по линии пути дрейфа, а не по линии ЯК.
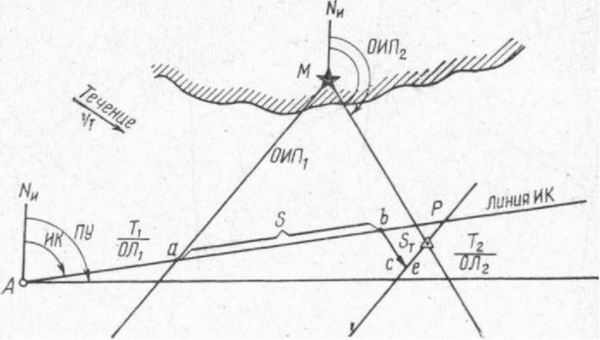
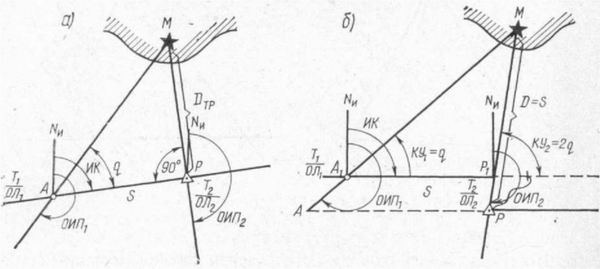
При наличии течения, известного по направлению и скорости
vT, из точки а пересечения линии ОИП1 (рис. 82) с линией ИК откладывают S = клрол. Из полученной точки Ъ прокладывают вектор по
направлению течения и по нему от точки Ь откладывают величину сноса судна течением за промежуток времени Т = Т2 — Т1, т. е. величину ST = VтT, и получают точку е, через которую прокладывают линию,
параллельную линии ОИП1. Точка Р перечесения этой линии с ОИП2
будет счислимо-обсервованным местом судна в момент взятия второго
пеленга.
Определение места при одновременном учете дрейфа и сноса течением выполняется в той же последовательности, что и при наличии
только одного течения, с той лишь разницей, что пройденное расстояние откладывается не по линии Я/С, а по линии пути при дрейфе ПУа.
На достоверность полученного места способом крюйс-пеленга оказывают влияние точность учитываемых поправок компаса и лага,
а также величины сноса.
Ошибка в А/С вызывает неточность как в прокладывании на карте
пеленгов, так и в счислении и может иметь существенное значение,
особенно когда судно от пеленгуемого ориентира находится на большом расстоянии.
Рис. 82
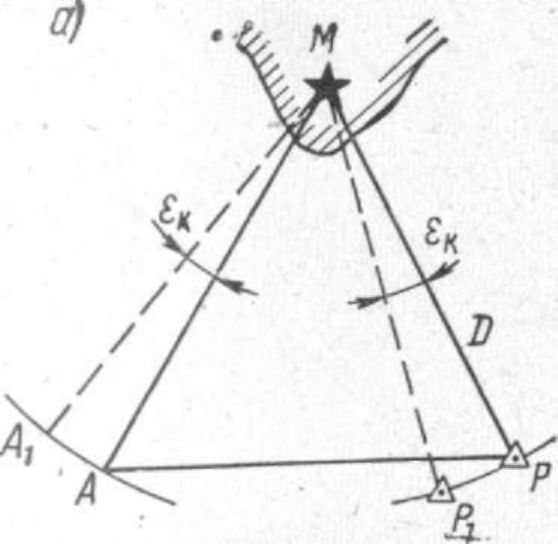
Например, если принять АК точной, то счислимо-обсервованное
место (рис. 83, а) будет в точке Р, если А/С содержит ошибку величиной ек, то место судна будет получено в точке Р1. Треугольник AMP
как бы повернется около точки М на угол, равный ек, и займет положение А1МР1 дуга РР1 представит собой как бы линейную ошибку
в счислимо-обсервованном месте судна.
Так как угол Ек мал, приравняем его величину к Ek/57,3 и, приняв
дугу РР1 за хорду, из треугольника РМР1 получим
Из этой формулы видно, что ошибка в счислимо-обсервованном
месте прямо пропорциональна D (расстоянию от судна до ориентира
в момент взятия второго пеленга).
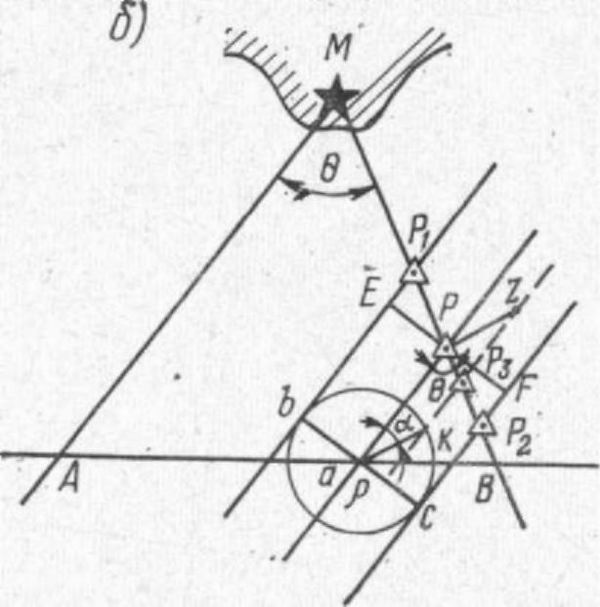
Вследствие ошибок в А/С и Ал место судна за период взятия пеленгов может оказаться внутри круга (см. § 20) радиуса р, проведенного
из точки а как из центра (рис. 83, б). Из рисунка видно, что наибольшая ошибка в определении места судна получится, если оно будет находиться в точках Ъ или с диаметра круга, перпендикулярного линии
первого пеленга МА, что соответствует счислимо-обсервованным местам в точках Р1 и Р2. Если провести через точку Р вспомогательную
прямую EF, параллельную диаметру bс, то наибольшую ошибку в полученном счислимо-обсервованном месте, выражаемую отрезками
РР1 = РР 2 по линии второго пеленга MB, можно определить из треугольников Р1ЕР и Р2РР:
а на основании формулы (28а)
Если имеется снос судна и счислимое место судна оказалось в точке К на окружности, то счислимо-обсервованное место определится
в точке Р3.
Рис. 83
Чтобы определить ошибку РР3 , сделаем вспомогательное построение, проведя линию PZ, параллельную направлению сноса ак, тогда
из треугольника PP3Z получим:
где а — угол между линией первого пеленга и направлением сноса, или
Если в данном районе имеется течение, то снос судна по его направлению будет равен vTT, и полагая, что р = VтT,
Следовательно, для большей точности получения места способом
крюйс-пеленга на течении необходимо по возможности первый пеленг
на ориентир брать в момент, когда направление на него совпадает с направлением течения.
Кроме того, при одном и том же значении а на величину ошибки
оказывает влияние продолжительность промежутка времени между
взятием пеленгов Т. Последний будет тем меньше, чем ближе к ориентиру находится судно, и при этом угол между линиями пеленгов 6 увеличивается быстр ее.
Частные случаи крюйс-пеленга
Способ определения места судна по траверзному расстоянию. Этот
способ заключается в том, что второй пеленг берут, когда ориентир
будет на траверзе, а затем рассчитывают траверзное расстояние DTР
и, отложив его от ориентира по линии ОИП2, получают счислимо-обсервованное место судна. Расчет траверзного расстояния ведут по формуле
Рис. 84
дай табл. 31 (МТ—63). Для вывода формулы рассмотрим прямоугольный треугольник MPА (рис. 84, а), из которого MP = AP*tgq, где
MP — траверзное расстояние DTР; АР — расстояние S, пройденное
судном между взятием пеленгов (S = кл • рол); q= КУ в момент взятия первого пеленга.
По формуле (62) можно вычислить расстояния для любых значений угла q. Но для облегчения и ускорения расчетов удобнее первый
пеленг брать на курсовых углах ориентира q = 45°; 63°,5; 71',6; 76°.
Так как tg 45° = 1; tg63°,5 = 2; tg71°,6 = 3; tg76° = 4.
В этих случаях если: q = 45°D = S; q=63°,5 D = 2S; q = 71°,6
D = 3S и q = 76° D = 4S.
Последовательность определения места судна этим способом следующая. Рассчитав отсчет первого компасного пеленга (ОКП1 =
= КК + q ± 180°, если ориентир с правого борта; ОКП1 = КК —
—q ± 180° — если ориентир с левого борта) наводят визирную плоскость пеленгатора на ориентир и начинают следить за изменением
пеленга. Когда пеленг ориентира будет близок к рассчитанному, нужно установить пеленгатор на рассчитанный отсчет и ждать, пока предмет «сам придет» на нить предметной мишени.
В этот момент замечают и записывают время и отсчет лага. Аналогично поступают и при наблюдении второго пеленга, но при этом, когда ориентир с правого борта ОКП2 = (КК + 90°) ± 180°, когда
ориентир с левого борта ОКП2 = (КК — 90°) ± 180°. Затем по формуле (62) либо по табл. 31 (МТ—63) определяют DTР. В последнем случае по сумме углов между курсом и первым пеленгом и изменением
пеленга, которая в данном случае всегда будет равна 90°, выбирают
множитель М (в таблице он набран жирным шрифтом) и SxM=DTР .
Рис. 85
Способ двойного угла. При этом способе второй пеленг берут в момент, когда КУ2 увеличится в 2 раза по сравнению с КУ1 в момент взятия первого пеленга.
На рис. 84, б треугольник МА1Р1 равнобедренный, сторона МР1 =
= А1Р1 т. е. расстояние до предмета в момент взятия ОКП2 равно
пройденному судном расстоянию за время между наблюдениями
(D = S).
Берут ОКП1 исправляют его и прокладывают на карте ОИП1
определяют угол q и по величине 2q рассчитывают ОКП2; прокладывают на карте линию ОИП2 и, рассчитав по разности отсчетов лага
действительное расстояние S, откладывают его на карте от ориентира
по линии ОИП2 и получают счислимо-обсервованное место судна Р.
На рис. 84, б получили невязку. Линии пути судна соответствует линия АР, а не А1Р1 как предполагалось до определения.
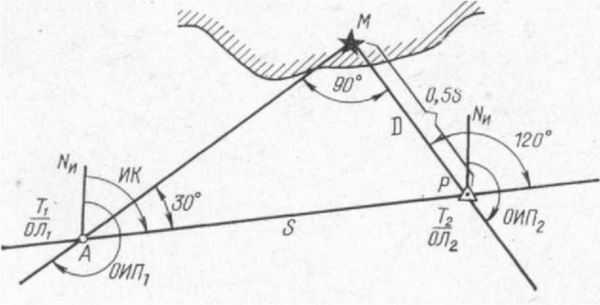
Способ прямого угла при ориентире. ОКП1 берут в момент, когда
курсовой угол на ориентир составляет 30°, а ОКП2 — 120°.
Тогда, построив треугольник AMP (рис. 85), в котором прямой
угол будет в точке М, получим, что MP = АР sin 30°, или D = Ssin 30°,
или D = 0,55. Следовательно, отложив от ориентира по линии ОИП2
расстояние 0,55, получают точку Р — счислимо-обсервованное место
судна. Необходимые расчеты и построения выполняются аналогично
предыдущим случаям.
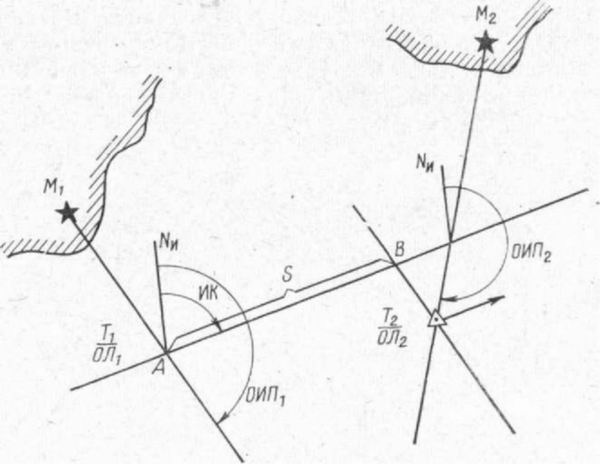
По разновременно взятым пеленгам двух ориентиров. Этот способ
применяется в случаях, когда единственный видимый с судна и нанесенный на карте ориентир М1 (рис. 86) скрывается из виду, а через некоторый промежуток времени открывается другой ориентир М2. В этом
случае перед тем, как ориентир М1 исчезнет из поля зрения, берут его
ОКП и замечают время и отсчет лага; как только откроется ориентир
М2, его пеленгуют и также замечают время и отсчет лага. После этого,
исправив ОКП, прокладывают их на карте и вмещают (подобно обще-
му случаю крюйс-пеленга) между линиями этих ОИП расстояние S,
пройденное судном за промежуток времени взятия ОКП, и получают
счислимо-обсервованное место судна.
Рис. 86
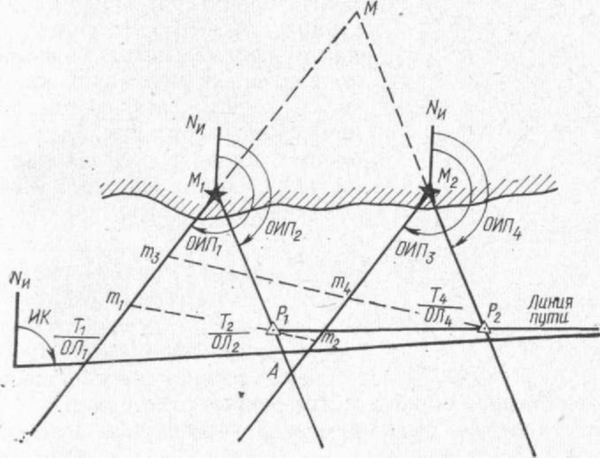
Способ двойного крюйс-пеленга. Его можно применять в случаях,
когда факторы от влияния ветра и течения на судно постоянны, но неизвестны, поправка лага также неизвестна и есть два ориентира, но
они находятся в пределах видимости неодновременно. При выполнении этого способа необходимо, чтобы судно шло неизменным курсом
и с постоянной скоростью. Когда виден ориентир М1 (рис. 87), берут
два пеленга (ОКП1 и ОКП2) через некоторый промежуток времени
t (с точностью до 0,1 мин) так, чтобы пеленги отличались между собой
на 30—40°. Затем ставят пеленгатор на ОКП3 = ОКП1 и выжидают,
пока откроется ориентир М2. В момент прихода ориентира М2 на установленный ОКП3 замечают промежуток времени t2 (с точностью до
0,1 мин) между взятием ОКП2 и ОКП3, далее ставят пеленгатор на
ОКП4 = ОКП2 и в момент «прихода» ориентира М2 на ОКП4 замечают промежуток времени t3 между взятием ОКП3 и ОКП4 с такой же
точностью. Исправив все ОКП в ОИП, прокладывают их на карте и выбирают произвольный коэффициент пропорциональности к для полученных промежутков времени t1 t2 и t3 (например, на каждую минуту
к = 0,5). После чего от ориентира М1 по линии ОИП1 откладывают
в масштабе карты расстояние M1m1 = кtl затем от точки А пересечения линий ОИП2 и ОИП3 по линии ОИП3 в сторону ориентира М2 откладывают расстояние Ат 2 = Kt2. Соединив точки m1 и m2 прямой,
получают точку Р1 в пересечении с линией ОИП2, в которой находилось судно в момент взятия ОКП3. Это можно доказать исходя из подобия треугольника Р1т1М1 и Рхт2А вследствие параллельности
и пропорциональности их сторон М1т1 и т2А и равенства углов при
вершинах (в точках Р1). Чтобы получить место судна в момент взятия ОКП4, находят на карте точку М в пересечении линий ОИП1
и ОИП4 за пределами ориентиров М1 и М2, отложив от точки М в сторону ориентира М1 расстояние Мт 3 = к (t1 + t2 + t3), а от точки М2
по линии ОИП3 расстояние M2m4 = Kt3, проводят прямую через точки т3 и т4 до пересечения с линией ОЯЯ4 в точке Р2, которая и будет
местом судна в момент взятия ОИП4.
Рис. 87
Прямая, проходящая через счислимо-обсервованные точки Р1 и Р2
будет линией пути судна.






 Важное
Важное

 Важное
Важное
.jpg) Важное
Важное
 Важное
Важное